It’s a new year for the team! We recruited ten new members who will continue running the Computer Science Club and working on the drone next year. HASMAAD will remain at the school for students to work with. The original MCA InvenTeam wanted other Academy students to experience the benefits of hands-on project-based-learning, so the drone will stay at the school as the InvenTeam legacy. Every year, new students will be invited to work on the drone and improve it, carrying on the spirit of developing a real-world application in our school.
More exciting news…we published an article in the Techniques magazine! The February 2015 issue features an article about the MCA InvenTeam and HASMAAD written by Meenal Kumar, Shreya Shirodkar, and Neha Shah.
Seven members of our team recently attended the ACTE CareerTech Expo in Nashville, TN. For four days, Neha Shah, Shreya Shirodkar, Meenal Kumar, Syed Raziq Mohideen, Hrishi Dharam, Hima Tamminedi, and Prathm Juneja, stayed in Nashville’s Gaylord Opryland, and discussed the invention. During a 15 minute presentation (the video will be posted soon), Mr. Paterno and three students spoke about HASMAAD as well as the plethora of benefits project based learning entails.
Overall, the experience was an amazing way to see how projects have repercussions in the real world, and it was great to make connections with organizations and companies. The team received a lot of constructive criticism as well as insightful questions about the mechanics of the drone, and we are working towards addressing any concerns and furthering HASMAAD.
Despite the culmination of our grant cycle, work on the drone will be continued. We are moving forward with HASMAAD as a part of the Computer Science Club at our school. Currently our team consists of seven members of the original team since six members graduated. We are looking to expand our team and include other students who will continue improving HASMAAD after we graduate.
We have also filed a provisional patent on the drone, specifically on the innovations of the unique image processing algorithm and the vertical spray boom. This is a huge step for us and we are very excited to apply for a full patent in the future!
Attending the LMIT EurekaFest event was an amazing experience. At the exhibition, we presented our invention to the public. We also met with other InvenTeams and learned about their inventions.
We are fortunate to have been a part of the 2013-2014 Lemelson-MIT InvenTeams program. We would like to thank The Lemelson Foundation for the opportunity with this grant. Additionally, we would like to thank our school district and our school for providing us with resources and support.
With the arrival of many required parts as well as a realization that pipe sizing is different from tube sizing, the spray boom has now been completed. It consists of a 1/2″ aluminum pipe with two 3/8″ holes drilled that allow two TeeJet nozzle bodies to clamp on to the boom. There is a cap at the end of the pipe as well as an adapter that connects the 1/2″ pipe to a 1/4″ NPT fitting at the end of a 5′ flexible pvc hose. During our first test flight with the spray system attached, we discovered that the spray boom sways too much and interferes with the flight of the drone. To fix this, we’re using a shorter flexible PVC tube and a much longer rigid aluminum pipe. We also have another plan to reduce the weight of the spray boom. The 1/2″ aluminum pipe has an actual outside diameter of .84″ and has relatively thick walls compared to 1/2″ aluminum tube (not pipe). We connect a few feet of aluminum tubing to a short length of PVC tubing and connect the aluminum pipe assembly at the end of the tube.
The aluminum pipe assembly that the nozzle clamp on to
This past Saturday, a town in our county, Woorbridge, held a street fair. The Academy was one of the organizations represented at the fair. The Academy booth was shared by the LMIT team and representatives of other aspects of the Academy. Not only was it fun but a lot of people showed interest in what we do! Check out the photos below.
About a month ago, we began to have issues with our video transmission and reception system, which, if not solved, would have crippled the Image Processing team’s efforts.
Transmission System Troubleshooting Complete!
After weeks of grueling trouble shooting and part replacement, we have finally gotten the system working again. The 5.8ghz transmitter had an issue in which the video feed was replaced with a purple fuzz, and once we were finally able to narrow down the issue to the transmitter, we ordered a new part and the transmission is now completely clear. As mentioned in previous blog updates, we are still using the dual receiver, which allows us to receive signals from two antennas, increasing the reliability of the system.
The transmitter and camera have also been successfully mounted on the drone, and we will have video footage from the drone itself after our next test.
Picture of the feed the computer receives from the drone’s camera.
Autonomous Flight Testing
After mounting the camera, we took the drone outside for autonomous mode testing. In this test, the UI team sent the drone pre-scripted commands through the Mission Planner software. We were able to control the drone’s height, speed, direction, and movement. In the video, the drone is taken to a high altitude using joystick control and then the autonomous mode is activated. It then descends to its programmed altitude and flies to its given waypoints in a very stable manner. The entire process from take off to landing can now be fully automated. Be sure to check out our gallery for more pictures. Next milestone?: Control drone flight based on image processing.
Spray Boom + Tank Update
In the past few days, our team received one of the most important components of our hardware system: the tank. We decided to opt for a prefabricated backpack sprayer and we’re currently working on a mounting apparatus to attach the entire spray system to the frame of the drone. We have the general design planned and now we need to begin working with our aluminum stock to construct a mount that will be secure and stable while keeping it as light as possible. We are also using a push-in tapered rubber plug as an easily removable cap for the tank. The plug expands and contracts via a wing nut which will create a secure and easily adjustable fitting for our tank.
We are creating the mount for the tank before assembling the system itself so that the navigation and control team can observe the behavior of the drone in fight with the tank and a fluid inside. Pictures to come!
This month, the hardware team tackled some structural changes to the overall frame design of the drone as well as implemented a new design for our tank, which will hold the pesticide while spraying, and spray boom.
Additionally, to house the brains of the drone, we needed some sort of cover. Normal dome covers are available but are not up to par when it comes to the structural integrity that we want in case of a situation where sensitive parts of the drone are at risk.
To alleviate the issue, we custom manufactured a dome that will act as a permanent housing with a removable top that will lock and lift when needed. The dome itself is being 3D printed by the Middlesex County College.
For spray boom design, we established that the boom needs to be flexible and have wheels to allow for proper landing. We have a few different designs which we have ordered and received. Now, we are in the process of testing the different designs to see which will best suit our needs.
two wheels in between 2 nozzles design
1 wheel in between 2 nozzle design
Navigation Control Team + Hardware Team + User Interface Team:
At this point, many of our sub-teams have begun integration and are now working with each other. With the drone built, the next major milestone that the Navigation Team, along with the Hardware Team and User Interface Team, has been working on is to have the drone fly stably under control of a joystick. Through various tests and examining the data recorded by Mission Planner, we found out that one of the reasons why our drone did not always respond how we wanted it to was due to the calibration. We re-calibrated the drone after we replaced parts such as arms and motors. As a result, our drone responded more accurately.
One thing that we learned through our flying tests with the drone was that it is not easy to control and navigate. Even with a joystick, the driver must learn to transition smoothly and not move the shaft with sudden force. This required practice, and although we damaged a few parts in the process, we are now able to successfully control the drone with the joystick!
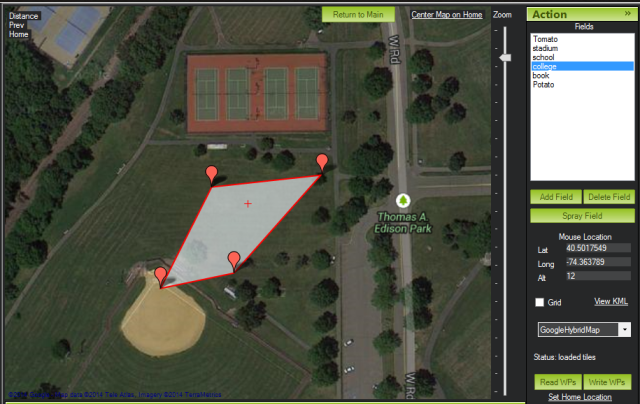
After this milestone, the next is to master autonomous flight using the Mission Planner control software. The UI team, in preparation, have been adding finishing touches on their
interface. The team added a way of outlining a field on the map.
Whenever a field is created, the user has to outline the field. It is then saved and can be displayed whenever it is selected from the field list.
Image Processing Team:
While flight testing is ongoing, the image processing team is working on refining their algorithms. We have two different algorithms, one is a contingency plan for the other. The more complicated algorithm involves texture detection and a complicated form of mapping. The contingency plan involves color detection and a color-based mapping algorithm. The latter is concerned with a very specific farm field whereas the former is advanced enough to apply to nearly all crop geometries.
Image processing, as well as the pesticide spraying mechanism and tank, will be integrated into the main system soon after we master autonomous flight using Mission Planner. Meanwhile, we are preparing by working on integrating the UI team with the IP team.
This past Wednesday was Guidance Day at our school. In celebration, our InvenTeam presented our drone during a meeting attended by regional guidance counselors. Their support and enthusiasm for our project was wonderful to see and a fun experience. Check out the pictures below!
On March 16, we took to the skies for our first unrestricted flight test! In previous tests, we kept the drone tethered to the ground but now, the training wheels were off.
Of course, a day of testing wouldn’t be complete without a crash! And that is exactly what happened. In the fifth round of testing, the drone experienced a failure. It fell on its side during a flight test using the joystick.
Fortunately, Mission Planner has flight logs which we were able to look back to. These logs document the drone’s specifics and the joystick control’s levels during each flight. Failure analysis indicates that the drone lost contact with the joystick when the throttle was changed from up to down. This can be attributed to the drone’s calibration being slightly off, resulting in a slight tilt which was overcompensated for by the throttle.
The images on the right show some of the data retrieved from the flight log. The top image shows the pitch and roll of the drone at the time of the crash. You can see that the pitch (red) and the roll (green) dramatically changed just before the crash. The bottom picture shows the throttle input received from the joystick. The throttle rises significantly but instead of gradually declining, the throttle dramatically plummets, which leads us to believe this is where the drone lost connection to Mission Planner.
The result? A fractured arm. Although no propellers were damaged, one of the arms sustained injury enough to render it unusable.
Proper propeller + arm arrangement
Damaged arm after crash; arm no longer allows for free propeller movemen
The arm has been replaced with a spare and we will be up and flying again this Friday. This time, we have experience and knowledge to prevent such a failure.